
“The assumption of an absolute determinism is the essential foundation of every scientific inquiry”
— Max Planck
Swarm behavior and swarm intelligence are fundamentally equivalent phenomena, differing only in their level of abstraction. Swarm behavior refers to the observable actions of a swarm system as it transitions from an initial uncoordinated state to complex coordinated swarming. Swarm intelligence represents the underlying cognitive architecture that enables and directs swarm behavior. Numerous studies across scientific disciplines have attempted to model the collective behavioral intelligence of swarms, with limited success thus far (Page et al., 2012; Corne et al., 2010). Social intelligence, the collective ability of swarms to make decisions and take coordinated action, arises from the concept of stigmergy – indirect coordination through the environment. Theorists have proposed various decision-making frameworks to explain the “wisdom of crowds” that emerges from swarm systems. For instance, the popular “wisdom of crowds” theory has empirical support from business, economics, and psychology research. However, concepts like distributed cognition and decentralized decision-making may provide deeper insight into the mechanisms underlying swarm intelligence (Page et al., 2012; Corne et al., 2010). The following sections present useful models that explain swarm social intelligence across multiple levels of abstraction. While swarm intelligence remains incompletely understood, abstract models complement empirical studies to progressively unveil the principles governing decentralized coordination and collective decision-making.

Biological swarm systems exhibit complex emergent behaviors that often conflict with mathematical models and simulations aiming to reveal their underlying dynamics. To address this, Hiroki Sayama proposed an Artificial Chemistry framework comprising a triad of the molecule set S, reaction rules R, and algorithm A connecting S and R into a simulated reaction system (Sayama, 2009). In this model, chemical reactions RA between molecules in S produce new molecules also within S. Swarm Chemistry builds upon this concept with a 2D model of semi-autonomous agents representing reacting molecules (Sayama, 2010). A population of agents governed by a common behavioral ruleset resembles a homogeneous swarm of one species. In the 2D model, each agent species has distinct kinetic rules defining its actions. Simulated reactions between species with different kinetic rules can then be initialized to observe and record 2D emergence patterns. Additionally, genetic algorithms and other evolutionary computational techniques are incorporated to evolve and discover novel patterns (Sayama, 2013). Overall, Swarm Chemistry leverages Artificial Chemistry to study the emergent behaviors arising from interactions between distributed agent species with simple local rules. The model provides insights into the self-organizing principles and nonlinear dynamics governing decentralized swarm systems across biology and engineering.
The swarm chemistry model proposed by Sayama has demonstrated several key capabilities and findings relevant to the study of emergent behaviors in decentralized systems. Initial 2D simulations revealed spontaneous pattern generation, encapsulation and restriction of agent movements, and interactive design of complex structures, suggesting applications in distributed formation control and optimization (Sayama, 2009). The model was then extended to incorporate open-ended evolution through recipe transmission between colliding agents (Sayama, 2011). This enabled inheritance, variation, and selection at the microscopic agent interaction level, driving evolutionary dynamics of macroscopic structures. Further 3D investigations revealed a remarkable robustness of emergent behaviors across dimensions, despite alterations in specific patterns (Sayama, 2012). Overall, swarm chemistry highlights the critical role of active rulesets governing local agent interactions. The model exhibits decentralized decision-making and cooperation among simple agents to produce complex emergent order. Findings also indicate chaotic environments promote open-ended evolutionary changes, and dimensional variations generate recognizable commonalities along with gaps in understanding morphological mechanisms. By distilling the principles of self-organization, nonlinear dynamics, and emergent complexity, swarm chemistry provides key insights into the properties of decentralized swarm systems across biological and engineered domains.
Carrillo et al. (2009) reviewed diverse mathematical models of swarming behavior, spanning particle-based, kinetic, and hydrodynamic representations. The first particle model characterized key properties like self-propulsion, friction, and attraction in an N-particle system capable of reaching an asymptotic speed. The second model provided a mathematical formulation for alignment interactions, together capturing Reynolds’ well-known separation, alignment, and cohesion rules governing swarm behavior (Page et al., 2012). In contrast, kinetic and hydrodynamic models involve more rigorous analysis, with noise or randomness incorporated to mimic real-world stochasticity. Numerical simulations validated model predictions. Later work by Carrillo et al. (2013) and Fetecau & Huang (2012) further refined the interacting potential functions of particle-based models to improve physical realism. Collectively, these studies (Carrillo et al., 2009; Carrillo et al., 2013; Fetecau & Huang, 2012) have advanced mathematical techniques for dynamically modeling swarms across a spectrum from discrete particles to continuum fields. Particle models balance analytical tractability against physical accuracy, while hydrodynamic models capture emergent dynamics at larger scales. This research provides valuable insights into self-organization principles and tools to quantitatively characterize swarm behavior for both biological and engineered systems. The models continue to be refined through integration of empirical data and computational analyses.
In summary, the phenomenon of swarming can be characterized by three key features:
- an underlying cognitive architecture
- social interactions between agents (homogeneous or heterogeneous), and
- emergent collective behaviors
As stated by Beni & Wang (1989), “A swarm is a group of homogeneous agents interacting in a chaotic environment using stigmergy to produce useful, deterministic global behaviors.” Building upon this definition, a general framework for analyzing swarm intelligence consists of:
- A cognitive structure – the agents’ intelligence model
- Social interactions – information exchange between agents within a chaotic environment that embeds an orderly outcome
- An emergent behavior – the systematic collective result
This framework satisfies several requirements including decentralized agent interactions, chaotic environmental conditions, and embedded orderly solutions arising from disorder. However, gaps remain in understanding phenomena like morphological mechanisms in dimensional simulations, robustness across dimensions, automatic pattern generation, microscopic particle-to-wave dynamics, and relating microscopic rules to macroscopic behaviors (Sayama, 2012; Carrillo et al., 2009). Integrating these elements could improve universal swarm models. Nevertheless, a mathematical basis offers an essential starting point to formally characterize swarm intelligence; therefore, to systematically characterize the fundamental properties of swarm intelligence, a mathematical framework using abstract formalisms is required. Such a framework provides an extensible yet simple interactive basis for three-dimensional modeling of swarms. It is evident that interactions within a swarm are strategic; thus, a basic game theoretic foundation is developed to enable further elaboration via analogical reasoning and design of neural network architectures.
The following content outlines the proposed prototype for swarm intelligence. The model (Figure X) situates homogeneous agents (E1, E2, E3) within an environment (Є) that can exhibit three chaotic conditions (1, 2, 3). Each agent has access to four distinct tactics (represented as —• in Figure 2), yielding 36 total tactics available to the swarm. With decentralized cooperation between agents, associations emerge between the tactics in the form of strategies. Strategies arise through combinations, permutations, replacement combinations, and replacement permutations of the existing tactics.
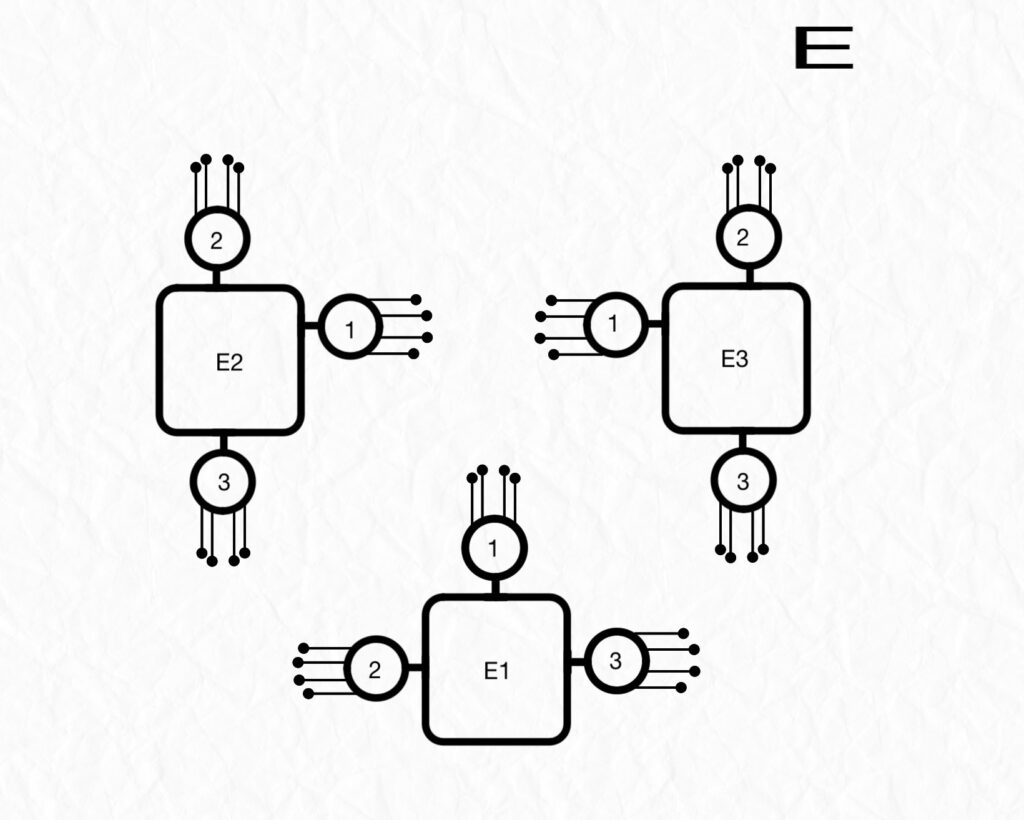
If agents have identical capabilities, combination/permutation possibilities vary and disperse across a spectrum. Heterogeneity increases this spread. However, average social behavior remains identical across agents.
To summarize the model:
- Environment: Є
- Conditions in Є: 1, 2, 3
- Tactics available per agent per condition: 4
- Total tactics available to swarm: 36
- Total combination strategies: 6.87×10^9
- Total permutation strategies: 1.01×10^42
- Total replacement combination strategies: 4.43×10^20
- Total replacement permutation strategies: 1.09×10^56
The proposed prototype offers a foundation for investigating emergent intelligence in decentralized multi-agent systems exhibiting cooperative behavior. Further analysis should focus on mapping environmental conditions to strategy domains and gauging collective response patterns. This can elucidate relationships between swarm composition, interaction mechanisms, and adaptive capabilities.
Four scenarios were analyzed to enumerate potential strategies: 1) Combinations – the number of ways to select r (3<r<36) strategies from 36 stratagems without replacement, where order is irrelevant. 2) Permutations – the number of ways to choose r strategies from 36 stratagems without replacement, where order matters. 3) Replacement Combinations – the number of ways to pick r strategies from 36 stratagems with replacement, ignoring order. 4) Replacement Permutations – the number of ways to choose r strategies from 36 stratagems with replacement, where order is significant. All evaluated strategies were presumed to elicit identical emergent global behaviors, reinforcing the concept of deterministic swarm dynamics regardless of the specific strategic amalgamation.
However, the above model lacks considerations of imperfection and temporality that are essential features. Two forms of time can be incorporated to enhance the model’s fidelity: (1) elapsed time and (2) fractal time. First, constraining the model dynamics from an initial state to a final emergent state implies that irrespective of the strategic combination, the end temporal state maps to an analogous spatial configuration in 3D space-time. Second, imposing a fractal time dimension where the swarm repeatedly utilizes different strategic amalgamations to achieve the same emergent state creates an illusion of continuity. The fractal nature of time obscures the transitional stages underlying the emergence, analogous to a motion picture depicting geometric fractals. With chaos and turbulence dismissed through temporal abstraction, the conceptualization of an idealized miniature swarm is now complete.
The proposed model provides an idealized, universal framework applicable to natural and artificial swarms alike, serving as a foundation for the theory of sentience elaborated in the final section. A key challenge in characterizing swarm intelligence is modeling the internal interactions. While existing models attempt to explain swarm behaviors, they lack generalizability. In contrast, the present prototype satisfies key prerequisites for an abstract mathematical representation of swarms. However, expanding this model is necessary to systematically elucidate decentralized decision-making at the microscopic interactive scale and resultant emergent swarm behaviors.
Game theory is another pivotal tool for characterizing swarm intelligence. While swarm behaviors originate from biological models, the applicability of swarm intelligence has expanded to encompass chemical, physical, and algorithmic systems. To conveniently express swarm intelligence using decentralized cognitive modules across this diverse range of domains, a modular or elemental representation requiring sophisticated modeling is necessary. For instance, in the model shown in Figure 2, the individual elements of the miniature swarm merely enable or facilitate interactions between distinct stratagems. The elements themselves serve no purpose if their corresponding stratagems are removed from the environment. This is analogous to the formulation of termite nests discussed previously, where “some configuration of materials triggers a response in a termite worker, transforming the configuration into another that may in turn elicit a different action by the same or a different worker” (Bonabeau et al., 2000).
There are instances of “predictive behavior” in bacterial populations where interfacing microbial “gene and protein networks learn through evolutionary changes”, implying not just instinctive actions but also “memory” to anticipate changing environmental conditions (Schuster and Yamaguchi, 2009).
A research article on the “Evolutionary Dynamics of Biological Games” (Nowak and Sigmund, 2004) proposes game theory as the most suitable framework to describe “frequency-dependent selection” in biological populations. It characterizes behavioral phenotypes simply as “strategies” that proportionally affect the fitness of a population on relative or co-dependent evolutionary timescales. More details on population dynamics (replicator dynamics, adaptive dynamics, innovative dynamics, etc.) are provided in later chapters on Game Theory.
As stated by Nowak and Sigmund (2004, p. 793), “Replicator and adaptive dynamics describe short- and long-term evolution in phenotype space and have found applications ranging from animal behavior and ecology to speciation, macroevolution, and human language. Evolutionary game theory is an essential component of a mathematical and computational approach to biology.”
Collective behavioral intelligence in biological populations is a complex concept. The notion that most behavioral phenotypes represent strategic play would make many uncomfortable. There is significant focus on decision-making approaches in swarm intelligence, which may extend to intelligent machines. The review by Schuster and Yamaguchi (2009) emphasizes that individual neurons function as modules within intricate neural circuits, and presents a game theoretic framework to model independent neurons. Their analysis exemplifies the applicability of game theory to intelligent machines.
The next section examines the role of decentralized knowledge in developing intelligent machines, and proposes a general neural network framework based on classical paradigms from the 1970-1980 period.
References
[1] Page, J.R., Olsen, J. & Michael, M.S. (2012). Multi-agent simulation of collaborative systems. Journal of Simulation, 6(4), 259-273.
[2] Corne D, Reynolds A & Bonabeau E (2010) Swarm intelligence. Handbook of Natural Computing. Springer, Berlin, Heidelberg. 1599-1622.
[3] Sayama, H. (2009). Swarm Chemistry. Artificial Life, 15(1), 105-114.
[4] Sayama, H. (2010). 2D swarm chemistry. Artificial Life Models in Software, 115-128.
[5] Sayama H. (2011). Seeking open-ended evolution in Swarm Chemistry. IEEE Symposium on Artificial Life (ALIFE), (pp. 186-193). Paris.
[6] Sayama H. (2012). Morphologies of Self-Organizing Swarms in 3D Swarm Chemistry. Genetic and Evolutionary Computation Conference – GECCO’12.
[7] Carrillo, J. A., Fornasier, M., Toscani, G., & Vecil, F. (2009). Particle, kinetic, and hydrodynamic models of swarming. In Mathematical modeling of collective behavior in socio-economic and life sciences (pp. 297-336). Springer, Boston, MA.
[8] Carrillo, J. A., Martin, S., & Panferov, V. (2013). A new interaction potential for swarming models. Physica D: Nonlinear Phenomena, 260, 112-126.
[9] Fetecau, R. C., & Huang, Y. (2012). Equilibria of biological aggregations with nonlocal repulsive–attractive interactions. Physica D: Nonlinear Phenomena, 260, 49-64.
[10] Beni, G., & Wang, J. (1989). Swarm intelligence in cellular robotic systems. In Robots and Biological Systems: Towards a New Bionics? (pp. 703-712). Springer, Berlin, Heidelberg.
[11] Schuster, A, Yamaguchi. (2009). Application of Game Theory to Neuronal Networks. 2010.
[12] Nowak, M.A & Sigmund K. (2004). Evolutionary Dynamics of Biological Games. SCIENCE, 303, 793-798. Retrieved April 8, 2017, from www.sciencemag.com